




|
Кількість
|
Вартість
|
||
|
|
|||
|
|
|||
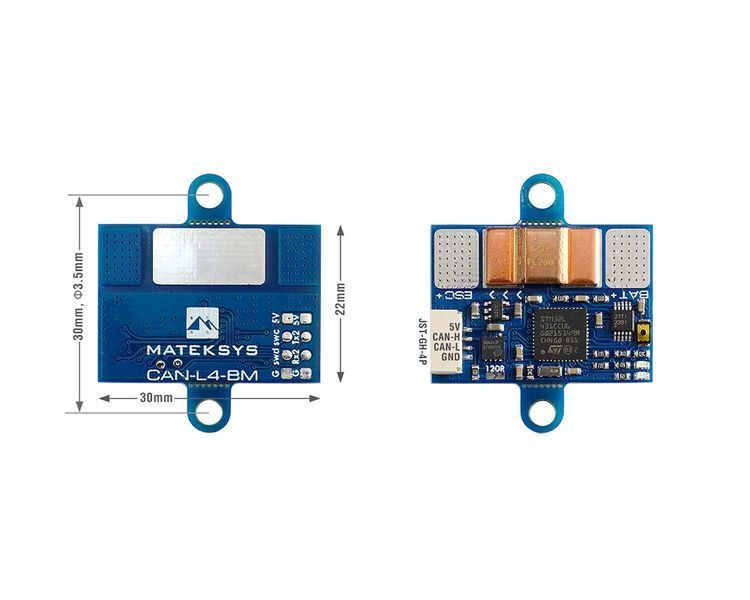
📌 Цифровий монітор живлення Matek CAN-L4-BM
Matek CAN-L4-BM — це високоточний цифровий монітор потужності, призначений для вимірювання напруги, струму та споживаної потужності у безпілотних літальних апаратах. Пристрій працює через CAN-шину (DroneCAN) та передає дані безпосередньо на польотний контролер або автопілот у режимі реального часу, без необхідності ручного калібрування.
Монітор побудований на базі високоточного вимірювального чіпа INA239 та мікроконтролера STM32, що забезпечує стабільні та достовірні показники навіть при високих навантаженнях. Це робить CAN-L4-BM ідеальним рішенням для FPV-дронів, літаків, VTOL-платформ та long-range систем.
✅ Переваги Matek CAN-L4-BM
-
Точне вимірювання напруги та струму без додаткового калібрування
-
Передача даних по DroneCAN з високою надійністю
-
Мінімальні втрати енергії завдяки низькому опору шунта
-
Стабільна робота з високими струмами
-
Компактні розміри та мала вага
-
Низьке власне енергоспоживання
-
Повна сумісність з автопілотами на базі ArduPilot
-
LED-індикація стану живлення та роботи CAN-шини
📦 Комплектація
-
Цифровий монітор живлення Matek CAN-L4-BM
-
Кабель JST-GH-4P → JST-GH-4P
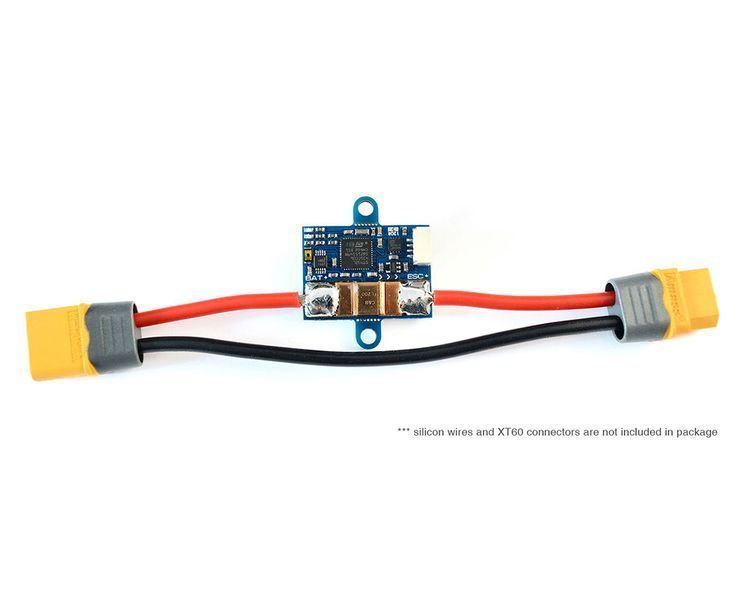
📍 Призначення та принцип роботи
Matek CAN-L4-BM встановлюється безпосередньо в лінію живлення акумулятора та зчитує параметри напруги й струму. Отримані дані обробляються на платі та передаються по CAN-шині на польотний контролер, де використовуються для:
-
відображення телеметрії в реальному часі;
-
контролю залишку енергії;
-
аналізу споживання під час польоту;
-
підвищення безпеки та надійності місій.
Такий підхід особливо корисний для long-range польотів та платформ із високим енергоспоживанням.
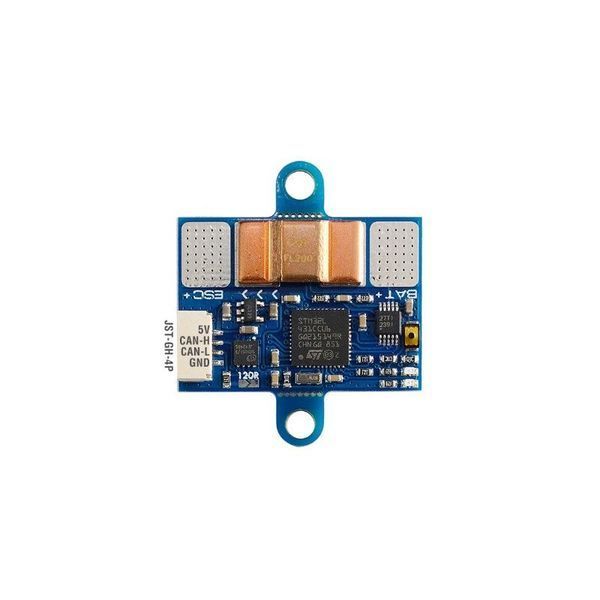
🔌 Схема підключення та розпіновка
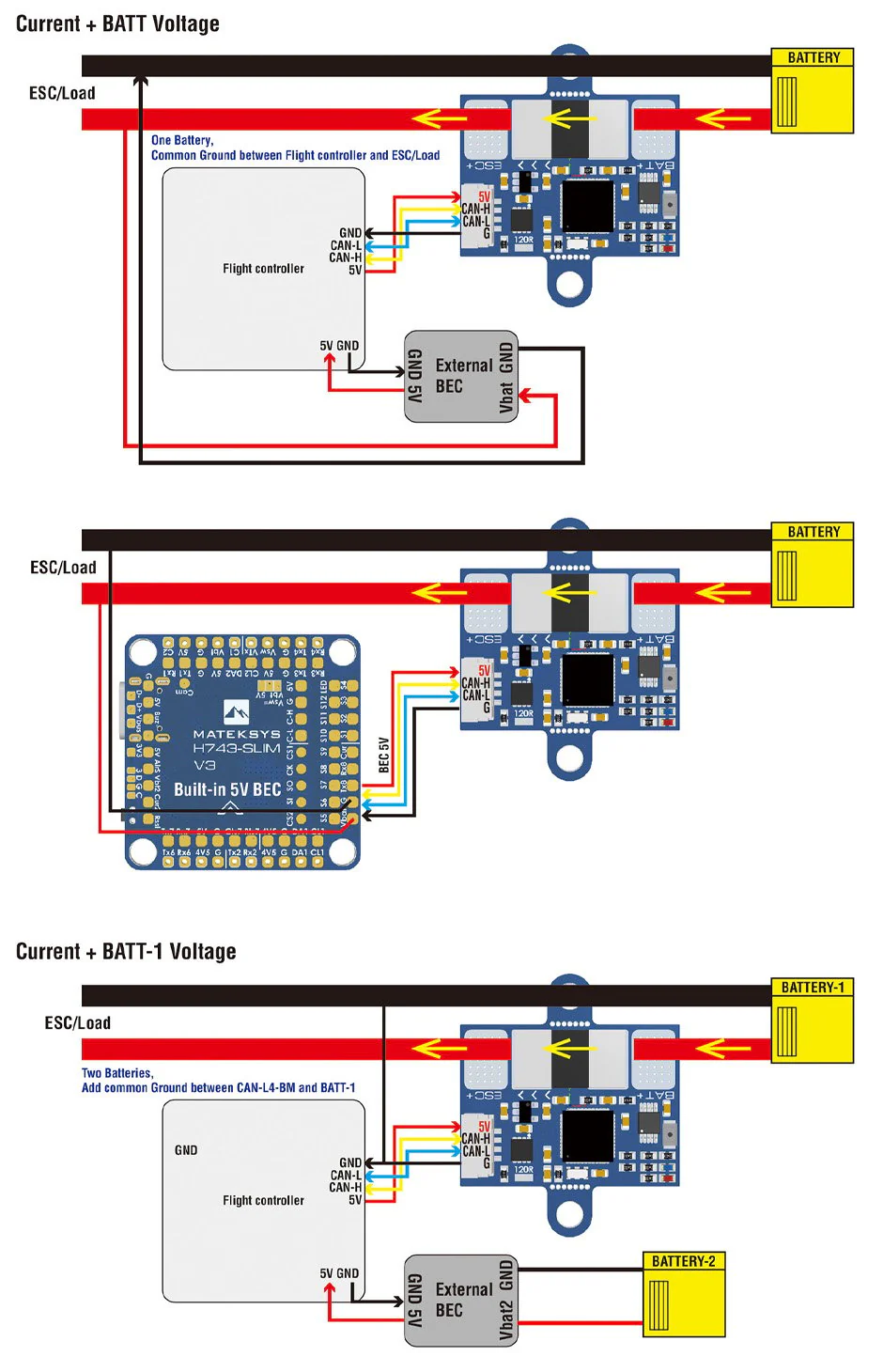
Пояснення:
-
CAN-H / CAN-L — підключення до CAN-шини польотного контролера
-
5V / GND — живлення модуля
-
JST-GH-4P — стандартний розʼєм для підключення
-
Світлодіодні індикатори показують стан живлення та активність CAN
💡 Рекомендується розміщувати цей блок після основного опису та переваг, перед рекомендаціями з налаштування.
⚙️ Налаштування
Для роботи CAN-L4-BM необхідно:
-
Підключити модуль до CAN-шини автопілота.
-
Активувати CAN-інтерфейс у налаштуваннях польотного контролера.
-
Увімкнути моніторинг батареї через DroneCAN.
Після цього дані про напругу, струм та потужність автоматично з’являються в телеметрії та логах польоту.